近年,Transformers在计算机视觉领域大放异彩。将transformer带入目标检测/实例分割的工作如过江之鲫,不胜枚举。而2020年Detection Transformers(detr)更是带来一种新的目标检测范式,启发了后续众多的工作。
detr简介
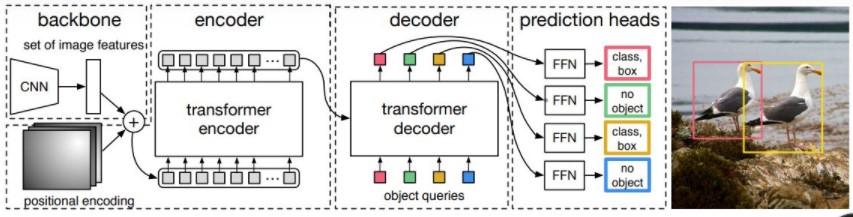
detr的结构如上图所示,图片经过cnn主干网络后得到特征图,加入位置信息后送入transfomer encoder,和一队可训练的object queries在transfomer decoder中进行交叉注意力计算,输出的结果经过FFN后直接得到回归框和类别分数,不需要nms等后处理,做到真正的端到端。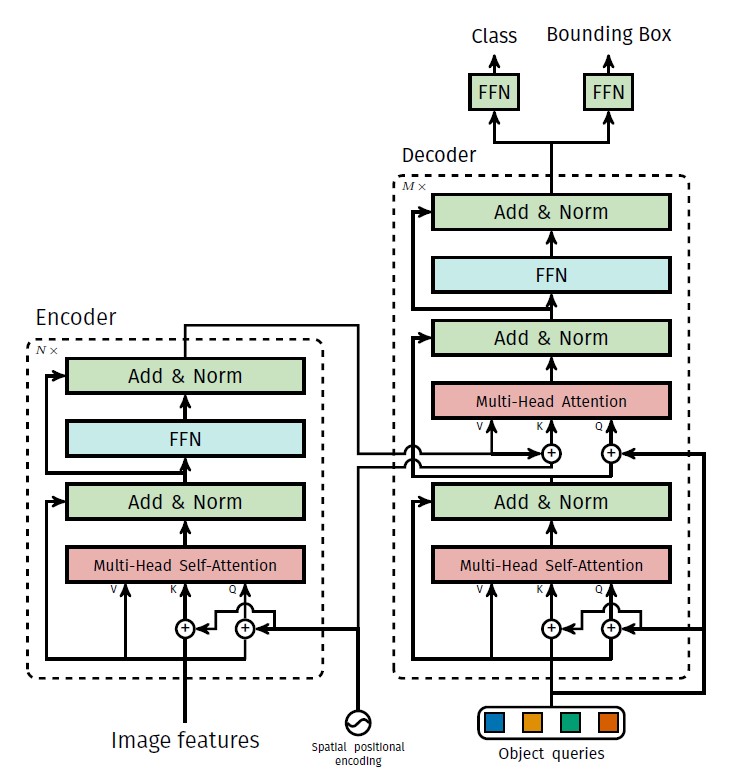
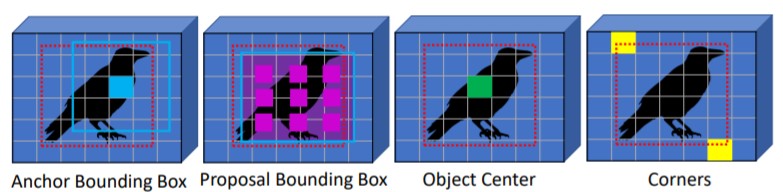
和传统的目标检测算法相比,detr摒弃了基于特征图的目标框回归方法,直接把目标检测视为set prediction问题,实现了对模型预测结果和图片中位置的严格绑定关系的解耦。

在训练过程中,detr的每个输出结果和ground truth进行分类损失和回归损失的匈牙利匹配,从而将每个object query和ground truth关联起来,匹配上的结果视为正样本,而未匹配上的结果视为负样本。这样,避免了传统的目标检测算法中多个预测值对应于一个ground truth的问题,从而实现对nms的去除。论文中,detr的object queries设为100或300个就可以取得很好的预测效果,远远少于yolo、centernet等单阶段检测网络动不动上万个输出结果,也要少于faster rcnn等二阶段目标检测算法上千个输出结果。由于避免了特征图和ground truth的直接关系,detr也很容易可以拓展到全景分割任务中,实现thing和stuff的统一输出。
因此,我们不难看出detr在工业应用中的主要优势:1、在复杂拥挤场景下,detr可以避免由于目标特征太近所产生的低质量目标框。虽然faster rcnn等二阶段算法理论上也可以避免这种低质量目标框,但detr作为一种单阶段算法也可以实现同样的效果,确实是一种突破。2、detr去除了nms等后处理,可以简化模型的部署代码。3、attention模块的应用使detr可以对图片中任意两点的关系进行建模,在检测细长物体(如铁轨、火车等)较纯cnn模型具有天然的优势。4、可以直接用来做全景分割。
当然,detr也存在着一些劣势,例如训练太慢(150~300epoch)、小目标检测效果差等,很多后续的论文都针对这两点展开,做了很多很有意义的工作。
一些在阅读detr源码中发现的point:
·detr没有利用fpn结构,而只利用了主干网络最后一层的特征图,这可能是造成detr在小目标检测弱势的原因。为什么不用多特征输出?可能真的用不起。transformer的attention结构将产生一个(B,N,HW,HW)的attention weights(注意力权重)。输入的特征图尺寸越大将导致这个矩阵呈二次方倍数增加,显存放不下。
·主干网络和transformer的学习率并不一致,主干网络的学习率为transformer的0.1倍,论文里也没解释为啥(莫名又多引入了超参数)。个人认为,引入了二分匹配的transformer较难训练,可能会发生较大的动荡(输出结果和ground truth匹配变来变去)。所以detr的主干网络都是经过预训练过的,这本质上是一种迁移学习,所以需要将主干网络的学习率做的比较小。
·在mmdetection中实现的detr回归的gt bbox是经过归一化的,而gt bbox归一化所用的长和宽是输入图片的resize后的长和宽,而非padding之后的尺寸。如果你训练和推理阶段图片输入大小相差较大,或者做了不同预处理手段,则可能造成推理时回归框偏差严重。
1 | tgt = torch.zeros_like(query_embed) |
·在transformer decoder输入的object queries只有queries pos是可以被训练的,而query每次都被初始化为0(上述代码中的tgt),这造成了transformer decoder的第一层self attention的输出结果都是0。个人认为object queries本质上起了类似一种可训练anchor的作用,object queries本身并不带有和图片内容相关的先验信息,也不应该有,因此携带位置尺寸等信息的queries pos是可训练,而query在被初始化为0,只有在和特征信息进行cross attention后query才带有真正有用的信息。
一些基于detr启发论文:
目标检测
Deformable DETR
为了解决DETR训练慢和在小目标物体检测效果差的问题,Deformable DETR提出可变形transformer结构。Deformable DETR认为造成detr训练慢的原因在于transformer的注意力机制需要对特征图全局密集的关系进行建模,使得模型需要长时间才能学习到真正有意义的稀疏位置。因此,Deformable DETR舍弃了每个query要和key点乘想法,而是自适应的采样K个点作为attention weight和value进行交互(当采样1个点时,deformable transformer退化为1×1的dcn,当采样所有点时,deformable transformer变为正常的transformer)。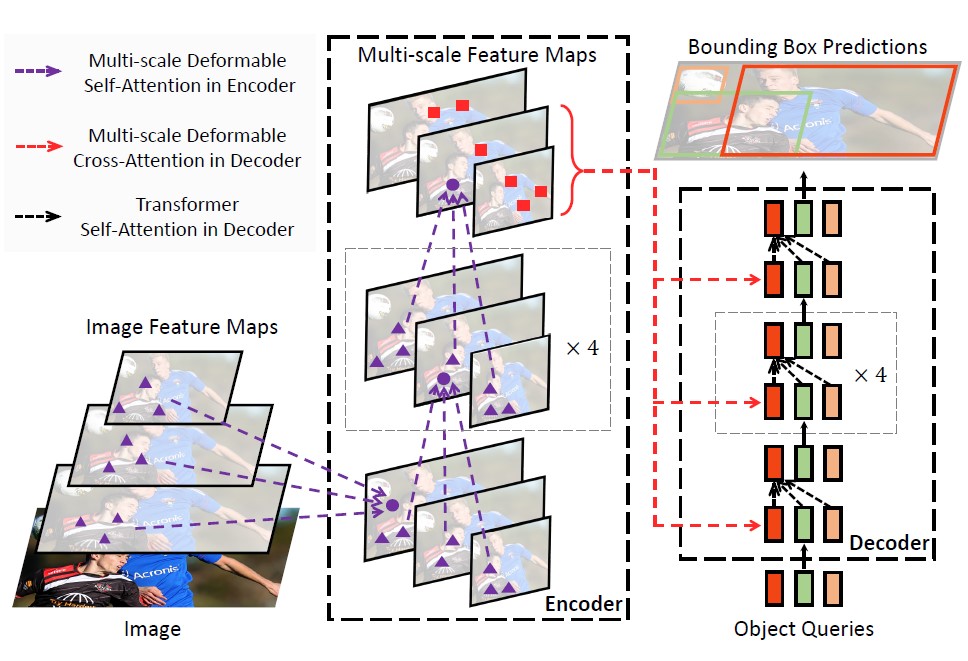
如图所示,Deformable DETR利用了不同level的特征图,即deformable transformer的采样并非集中在同一层,而是可能来自其他level的特征图。通过这种方式Deformable DETR实现对小目标物体的精度提升。此外,Deformable DETR不再直接回归gt bbox,而是回归一个偏移值来加速回归框的收敛:
1 | reference_points = self.reference_points(query_embed).sigmoid() |
deformable detr解决了detr的小目标检测弱和训练步数太长的问题(仅用了50个epochs,相比detr缩减2/3),但deformable transformer作为一种新算子给deformable detr的部署带来了相当大的问题。若想在工程中实际应用,可能还要面临手写tensorrt算子的问题。
Conditional DETR
针对detr训练步数太长的问题,conditional detr认为在decoder中,detr的query要同时和key中的content embedding以及spatial embedding做匹配,detr高度依赖高质量的content embedding去定位物体的extremity区域,而这部分区域恰恰是定位和识别物体的关键(就是query既要参与实例的空间位置计算又要参与实例的类别计算)。因此,conditional detr将原detr中decoder的cross-attention部分进行解耦,并提出conditional spatial embedding。Content embedding只负责根据外观去搜寻跟物体相关的区域,而不用考虑跟 spatial embedding的匹配; 对于spatial部分,conditional spatial embedding 可以显式地定位物体的 extremity 区域,缩小搜索物体的范围,如下图所示。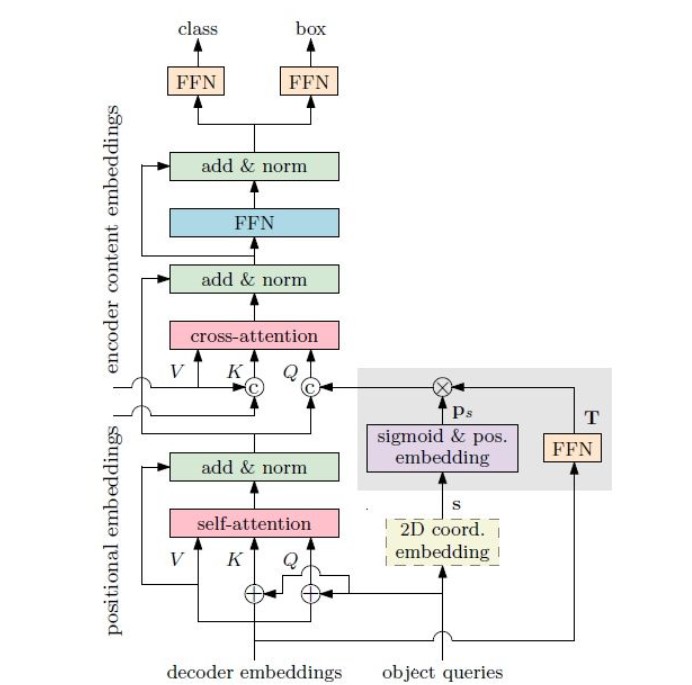
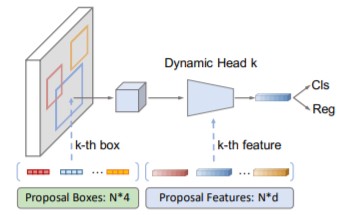
Sparse R-cnn
Sparse RCNN借鉴了detr set prediction的思想对faster rcnn进行了非凡的创新。Sparse R-CNN去除了faster rcnn的RPN结构,利用可学习的proposal boxes代替(和detr中的object queries非常类似),如下图所示: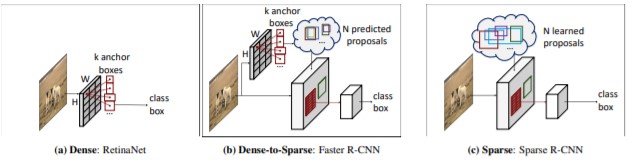
Sparse RCNN在训练速度上大大优于detr,精度上也到达了不错的水平,不过又把恼人的roi align加了回来,所以在部署上并不占优。
实例分割/全景分割
Solq
Solq这个名字非常像2020年的单阶段实例分割算法SOLO,但实际上算法原理更像是deformable detr和dct mask的组合。
如上图所示,solq在deformable detr的decoder多增加了一个dct(离散余弦变换)分支(非常像mask rcnn的mask head分支)用于预测当前实例的掩码。使用dct相比逐像素预测给实例的掩码轮廓带来的更强的鲁棒性。
Maskformer
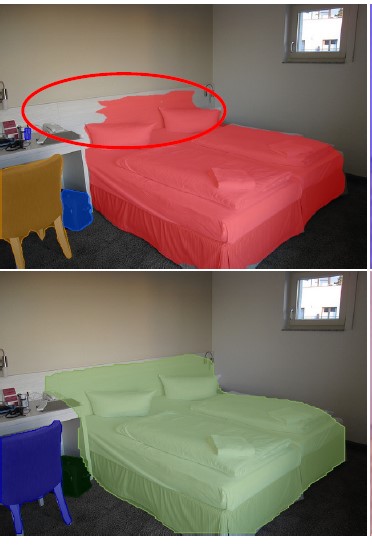
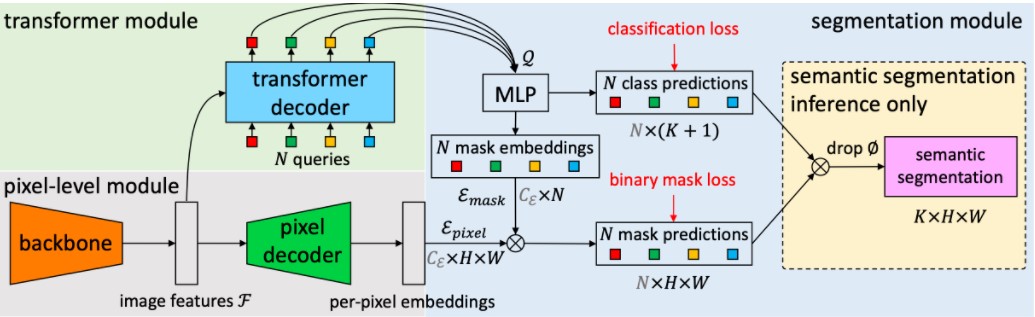
和Solq相比,Maskformer更像是detr和SOLO结合的产物。Maskformer利用queries得到每个实例的类别和mask kernel,mask kernel和特征图进行卷积得到每个实例的掩码(非常SOLO),如下图所示:
K-Net
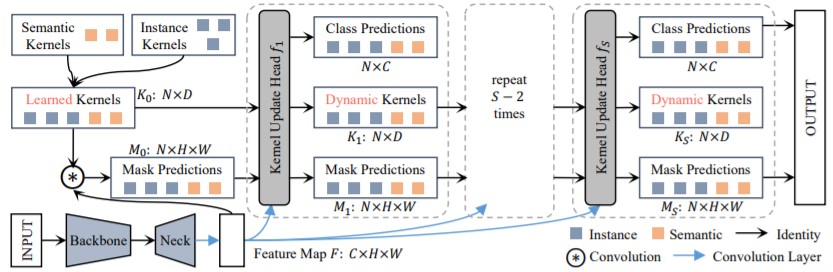
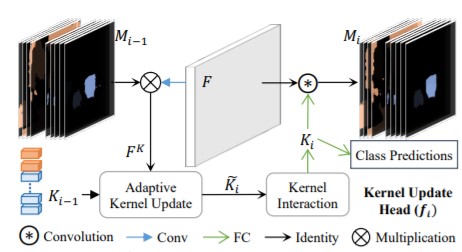
和Sparse RCNN相似,K-Net也没有直接利用transformer,而是借鉴了detr的set prediction思想。K-Net送入一组可学习的object feat(类似object queries)经过ffn后得到每个实例的mask kernel,mask kernel和特征图进行卷积得到每个实例的掩码(也非常SOLO),随后利用得到掩码经过kernel update head对object feat进行更新,经过几次更新后得到每个实例的类别和掩码(其实整个结构也很类似去除了encoder的transformer),如下图所示:
相较于Maskformer而言,K-Net利用了更大的特征图进行cross attention,而显存占用反而更小,训练速度上也要更快(50个epochs)。